4in / 4out Mixer "四進四出" 混控器
for R/C Quadrocopter / Quadcopter 四旋翼機
PIC16F84A V1.13 DIY
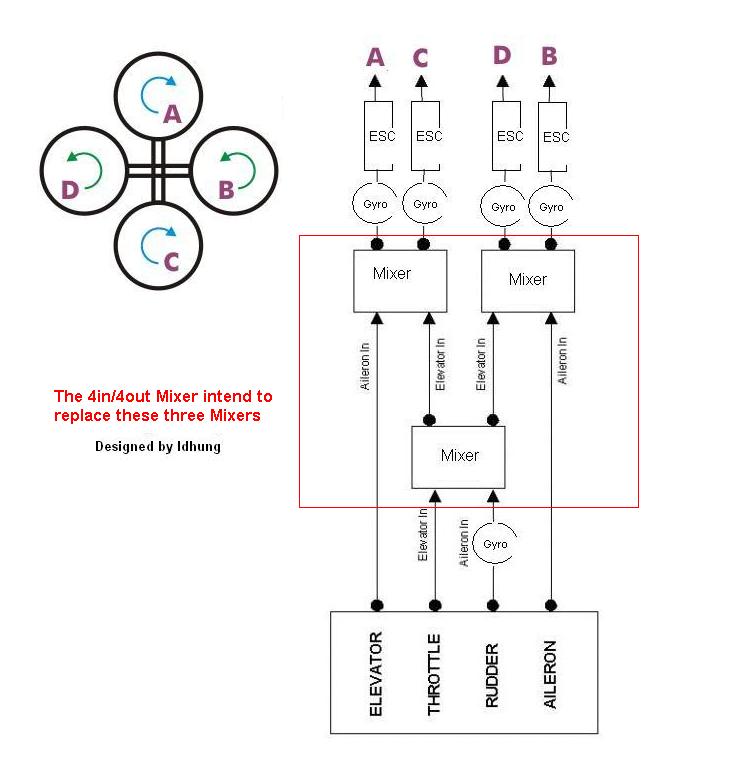
越南的 LD HUng 來信說他用3顆,我設計的 V-tail Mixer 來控制四旋翼機,,並且問我是否可以改程式來加快反應。
經mail往來討論後,我認為重新設計一顆 "四進四出" 會比用3顆來得好,只需一個PIC16F84A,功能如下:
V1.13 版為 V1.1加上 Esky 0704 陀螺儀的驅動程式,這部份程式是由LD HUng 寫的
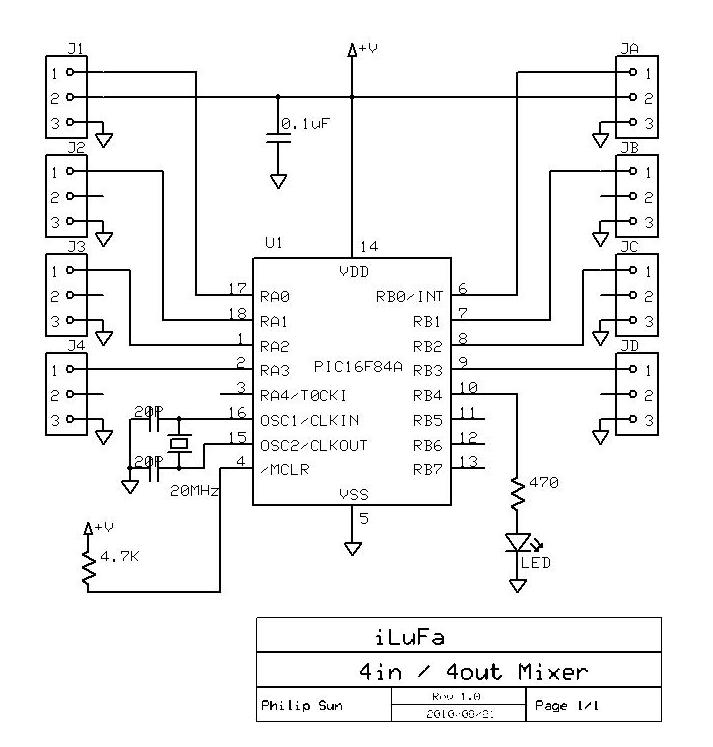
最後的接線如下:
Here is LD HUng 的討論區 (越南文)
http://www.clbmohinh.com/forum/tm.aspx?m=382664
影片有點長:
fly :http://www.youtube.com/watch?v=W_B1ciAcq4Q
hover:http://www.youtube.com/watch?v=PDuhl7WgeIc
Crash:
http://www.youtube.com/watch?v=5YUzbi_UWoA
==========================================
2010/09/20 Update
(V1.13) 為 V1.1 加上 Esky 0704 陀螺儀的驅動程式,這部份程式是由LD HUng 寫的
----------------------------------------------
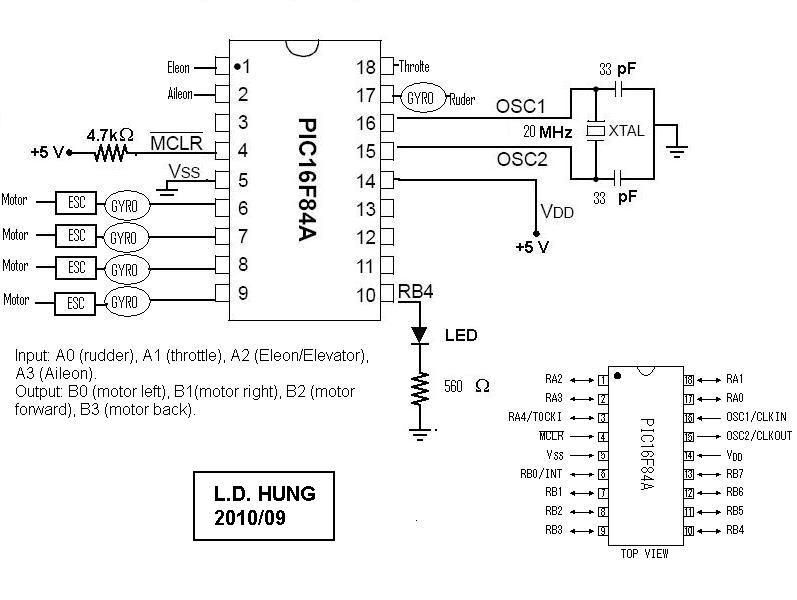
Input: A0 (rudder), A1 (throttle), A2 (Eleon/Elevator), A3 (Aileon).
Output: B0 (motor left), B1(motor right), B2 (motor forward), B3 (motor back).
( Why V1.1x ? 英文解說 )
(V1.12) V1.1的小動作版,更容易控制,推薦使用。運算式如下
B0 = A1 - ΔA0/2 + ΔA3/2
B1 = A1 - ΔA0/2 - ΔA3/2
B2 = A1 + ΔA0/2 - ΔA2/2
B3 = A1 + ΔA0/2 + ΔA2/2
----------------------------------------------
(V1.1)
第1.0版是仿照3顆混控器的動作。第1.1版,不再仿照3顆混控器,而是一發揮"四進四出"的優點。
B0 = A1 - ΔA0 + ΔA3
B1 = A1 - ΔA0 - ΔA3
B2 = A1 + ΔA0 - ΔA2
B3 = A1 + ΔA0 + ΔA2
==========================================
注意:
---------------------------------------------------------
這顆混控器是針對 PPM 系統設計,還沒在 PCM 系統測試,如果你是使用 PCM 系統,請來email
告訴我使用結果。
程式會自動偵測 channels 的先後順序,當接收到正常的訊號時 LED 會亮起,正常時每秒閃爍50次 (Futaba compatable PPM system), 看起來就像一直亮者,如果 LED 有明顯的閃爍,先將混控器斷電,再重新上電就 ok
有些陀螺儀 (gyro) 會有不可預期的延時,裝在接收機與混控器之間可能會有問題 (LED 有明顯的閃爍),裝在混控器之後的陀螺儀不會有問題。
這顆混控器程式是以CCS
C語言寫的,如果你要設定為其他運算式,只要修改程式 Calculating那段就可以。
---------------------------------------------------------
我沒有四旋翼機,實機測試是由 LD HUng 在越南測試。
V1.13 PIC16F84A.C PIC16F84A.HEX
V1.12 PIC16F84A.C PIC16F84A.HEX
V1.1 PIC16F84A.C PIC16F84A.HEX
======================================================================================
You MAY duplicate, modify, give away or sell the original files in the web site or anything you derive from it.
ATTENTION : It is your own responsibility, if any damage cause by using the web site.
Philip Sun / TAIWAN
copy right 2004
